
做后感悟:

OLED显示函数需要一直显示,所以在主函数中要一直循环,为了确保这个检错功能error只输出一次,最好用中断串口进行接收数据,数据收完后自动进入中断函数中,做一次数据检查就好了,该开灯开灯,检查后还可以更新计数器,要是用普通串口接收的话事情要麻烦的多
代码:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ // 中断串口
Function_CheckUrxReceive(URxdata[0]); //检查更新灯泡状态
Function_OledShowError(Function_GetCheckflag()); // 显示error
}
void Function_CheckUrxReceive(unsigned char receive){
if(receive == '@') Function_Ld5Toggle();
else if(receive == '#') Function_Ld2Toggle();
else if(receive == '$') Function_Ld3Toggle();
else {
checkflag = 0;
return;
}
checkflag = 1;
}
unsigned char Function_GetCheckflag(){
if(checkflag == 1){
checkflag = 0;
Rxnumber = Rxnumber + 1;
return 1;
}
return 0;
}
需要一个标志位查看是否显示错误信息,还能更新计数器
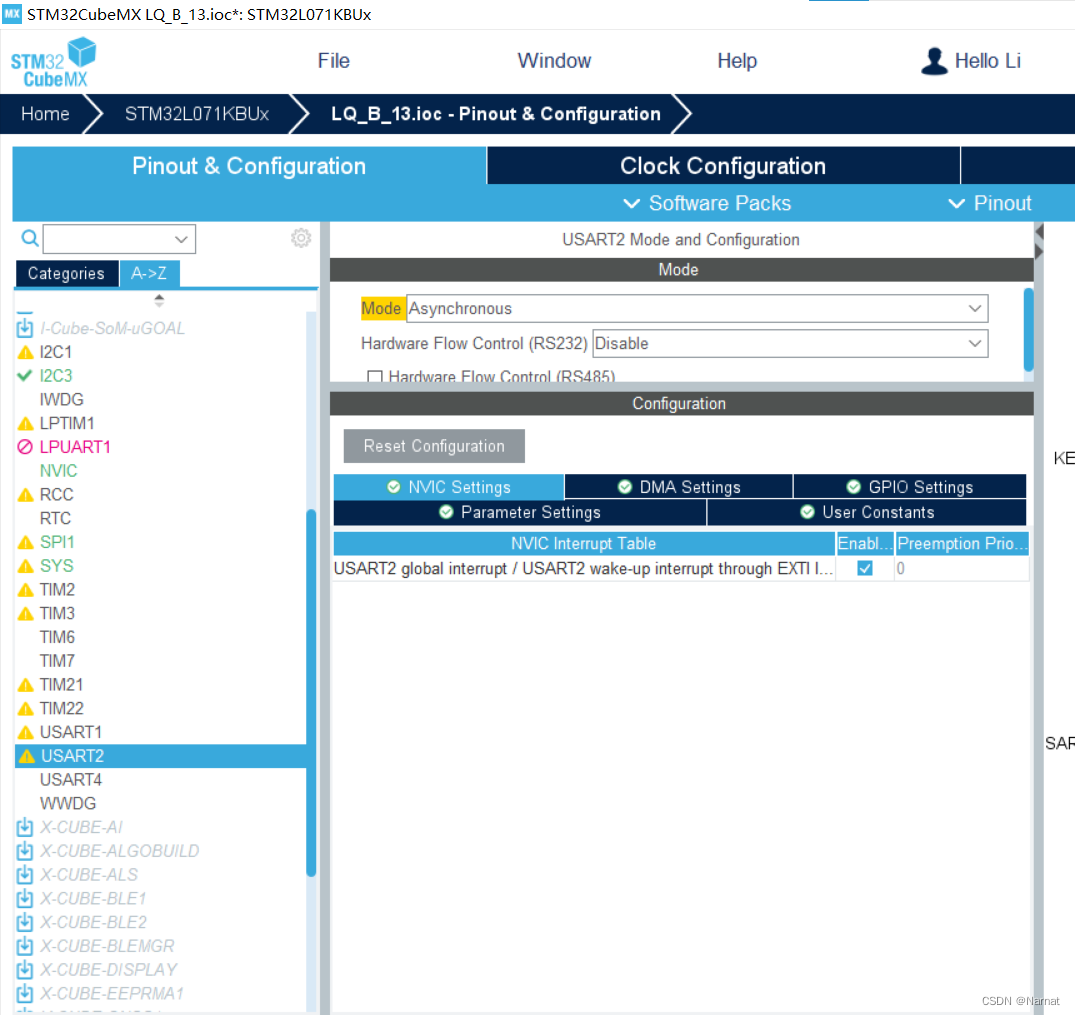
开中断串口也不难,USART2 异步通信 中断enable就可以了非常的好用
一定一定要注意的一点是串口中断函数内不要放延时函数,谁用谁知道,系统直接卡死!!!
按键:
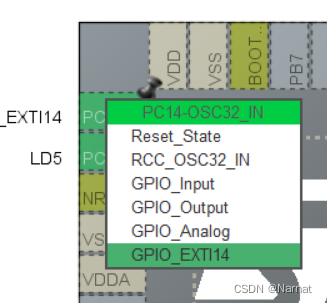
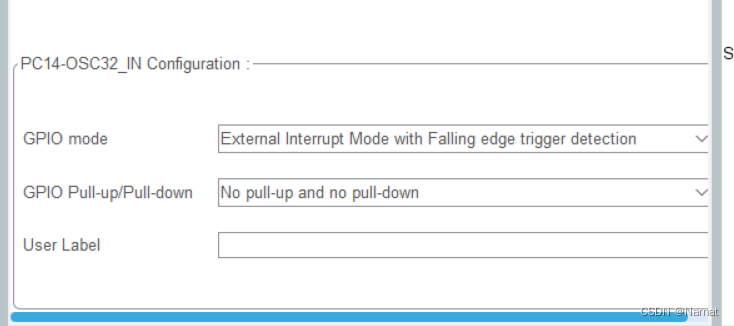
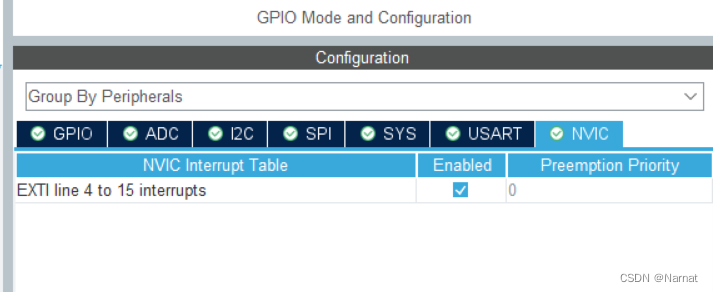
对于按键来说,我个人感觉中断按键要比ReadPin按键要丝滑,中断按键点一下就有反应,普通按键要按一会儿再松开才行,点太快可能没反应,我建议用中断按键,中断按键需要点击外部中断,再选择中断方式,再enable一下即可
最后对于代码的排版,最好是能将所有代码放入一个.c文件内,全局变量,都写在里面,最后通过一到两个函数给主函数调用
发现了一个有趣的现象,当中断函数中有oledshowstring函数想显示一个字符串,主函数的while函数中也有一个显示函数的时候,这个时候触发中断,中断函数中的显示函数无法被执行,当主函数代码量增多的时候,中断函数的显示函数有可能被执行,我想原因大概是主函数在显示数据的时候写一半突然中断后,进入中断内的显示函数,显示标无法被调整,这可能是OLED函数的代码原因,解决方法,就是主函数的显示函数后加一些延时即可,在延时期间进入中断写字符串,避免主函数正在写字符串,突然被叫到中断中写字符串
问题代码:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "i2c.h"
#include "gpio.h"
#include "Function.h"
#include "oled.h"
#include <stdio.h>
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
unsigned char c[1];
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
OLED_ShowString(0, 2, "okokokok", 16);
char b = HAL_GPIO_ReadPin(KEY_USER_GPIO_Port, KEY_USER_Pin);
sprintf((char*)c, "%d",b);
//if(GPIO_Pin == KEY_USER_Pin)
//OLED_Clear();
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C3_Init();
/* USER CODE BEGIN 2 */
Function_OledInit(50);
/* USER CODE END 2 */
unsigned char a[1];
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
char b = HAL_GPIO_ReadPin(KEY_USER_GPIO_Port, KEY_USER_Pin);
//sprintf(a, "%d", b);
OLED_ShowString(0, 0, "123", 16);
sprintf(a, "%d", b);
//HAL_Delay(1000);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLLMUL_4;
RCC_OscInitStruct.PLL.PLLDIV = RCC_PLLDIV_2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_I2C3;
PeriphClkInit.I2c3ClockSelection = RCC_I2C3CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */